銷售咨詢熱線:
15901984249
美國邦納BANNER邦納雷達(dá)傳感器的工作原理及應(yīng)用
雷達(dá)banner傳感器使用調(diào)頻連續(xù)波(FMCW)雷達(dá)可靠地檢測移動或靜止目標(biāo),包括天氣條件下的汽車,火車,卡車和貨物。 基于雷達(dá)的傳感器非常適用于移動設(shè)備上的防撞,例如伸臂式堆垛機(jī),叉車和采礦車輛或港口機(jī)械,如運輸工具,搬運工和托運人。
將激光雷達(dá)安裝在車道正上方,使之垂直向下探測,如圖1所示
當(dāng)沒有車輛經(jīng)過時,探測的是激光雷達(dá)到地面的距離,假定為X
當(dāng)有車輛經(jīng)過激光雷達(dá)下方時,探測的是激光雷達(dá)到車輛頂部的距離,假定為Z
X的值肯定比Z的值大,此時從數(shù)據(jù)上可以區(qū)分開是否有車輛經(jīng)過,從而配合系統(tǒng)實現(xiàn)車流量的統(tǒng)計。
另外,根據(jù)Z值的不同,激光雷達(dá)還可以配合系統(tǒng)判別該車輛的高度,從而粗略的實現(xiàn)大小車型的判斷。
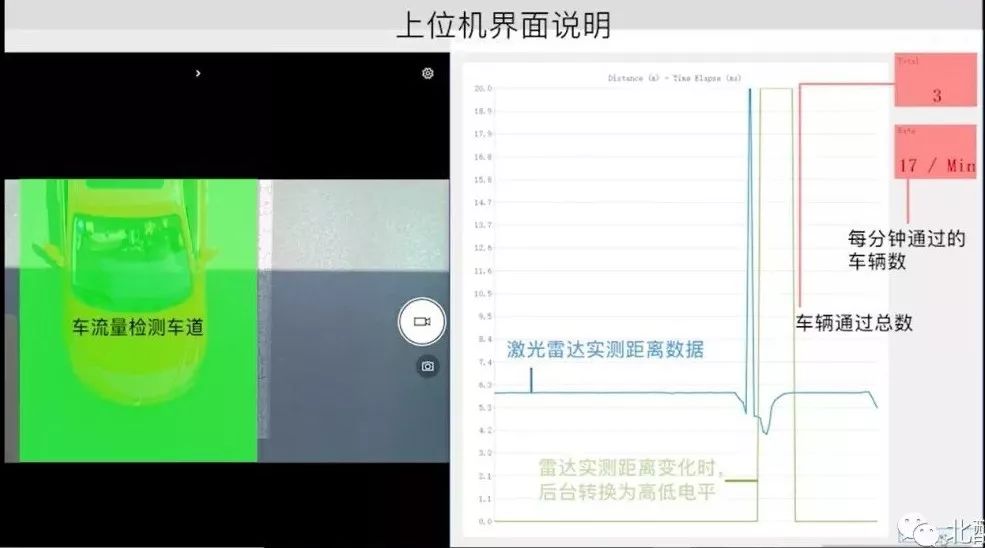
圖2 激光雷達(dá)上位機(jī)界面說明圖
值得一提的是,該激光雷達(dá)除了統(tǒng)計車流量,還可觸發(fā)攝像頭拍照功能。
圖3 激光雷達(dá)探測車輛通過1次,可觸發(fā)攝像頭拍照
該款激光雷達(dá)在實際應(yīng)用中,基于TOF(Time-of-Flight)即飛行時間原理,采用相位法實現(xiàn)測距功能。具體為激光雷達(dá)發(fā)出經(jīng)調(diào)制的近紅外光,遇物體后反射,傳感器通過計算調(diào)制紅外光的發(fā)射、反射后產(chǎn)生的相位差,來換算與被測目標(biāo)物體之間的距離,以產(chǎn)生深度信息(可參照如下測距原理示意圖)
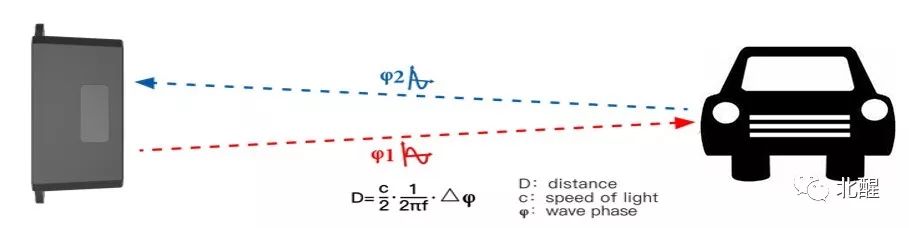
圖4 該激光雷達(dá)測距原理示意圖
實施便捷
激光雷達(dá)現(xiàn)場實施便捷,且安裝成本較低。除了案例中的安裝方式,還可以在高速卡口前方安裝,如下圖所示。
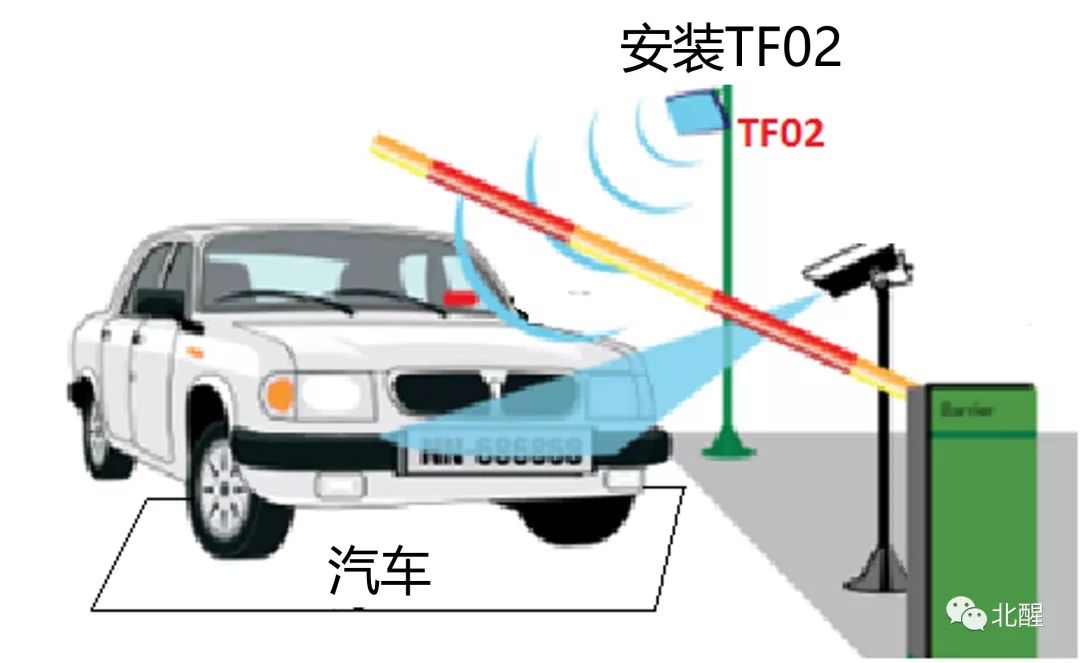
圖5 激光雷達(dá)配合統(tǒng)計車流量的另一種安裝方式
穩(wěn)定
激光雷達(dá)可全天候運行,穩(wěn)定性強(qiáng)
準(zhǔn)確率高
通過該激光雷達(dá)自主研發(fā)的自適應(yīng)算法,車流統(tǒng)計準(zhǔn)確率達(dá)到99%
操作簡單,易集成
激光雷達(dá)操作簡單,便于集成到系統(tǒng)中采集數(shù)據(jù)
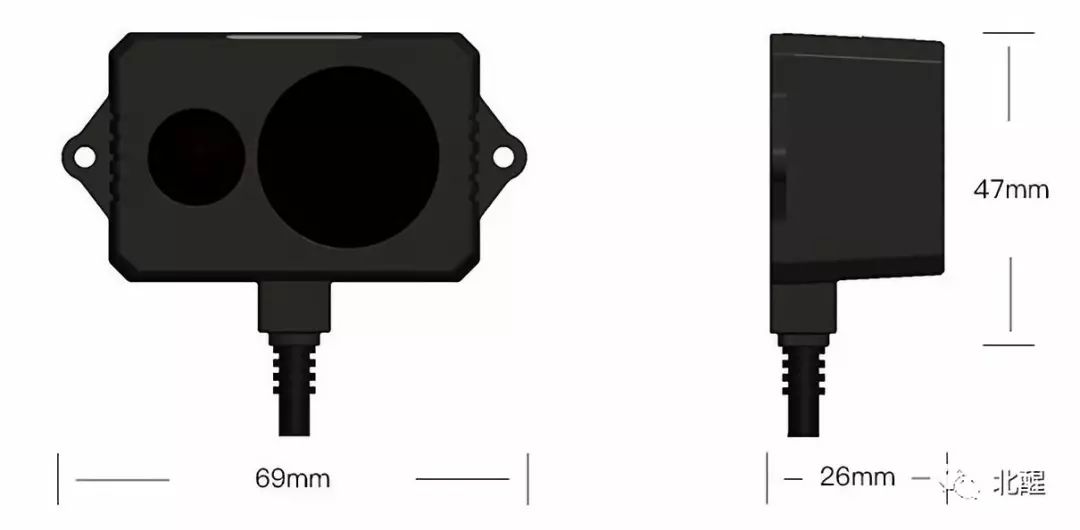
該客戶應(yīng)用的統(tǒng)計車流量的激光雷達(dá)是北醒早已量產(chǎn)的TF02單點測距激光雷達(dá),擁有達(dá)22m的量程和更穩(wěn)定的測距性能。外殼材質(zhì)選用高強(qiáng)度防腐蝕材料,提高了室外較惡劣環(huán)境的適應(yīng)性。同時結(jié)合創(chuàng)新的生產(chǎn)工藝和軟、硬件多項優(yōu)化,使得激光雷達(dá)真正達(dá)到了消費級。
如有需求,請見: 美國邦納BANNER邦納雷達(dá)傳感器
